
我们研发的机器人关节电机(以 44.5mm 外转子电机为例)是典型的轻负载、高精度、紧凑型关节电机,核心优势在于:
小体积、高功率密度,完美适配机器人关节的集成需求;
无刷结构 + 48V 供电,兼顾可靠性、能效与工业级应用标准;
精密公差设计,保障关节运动的平稳性与定位精度。
它主要面向轻负载协作机器人、服务机器人、AGV 辅助机构等场景,是实现机器人小型化、模块化、高可靠性关节驱动的理想选择。
一、电机核心特征
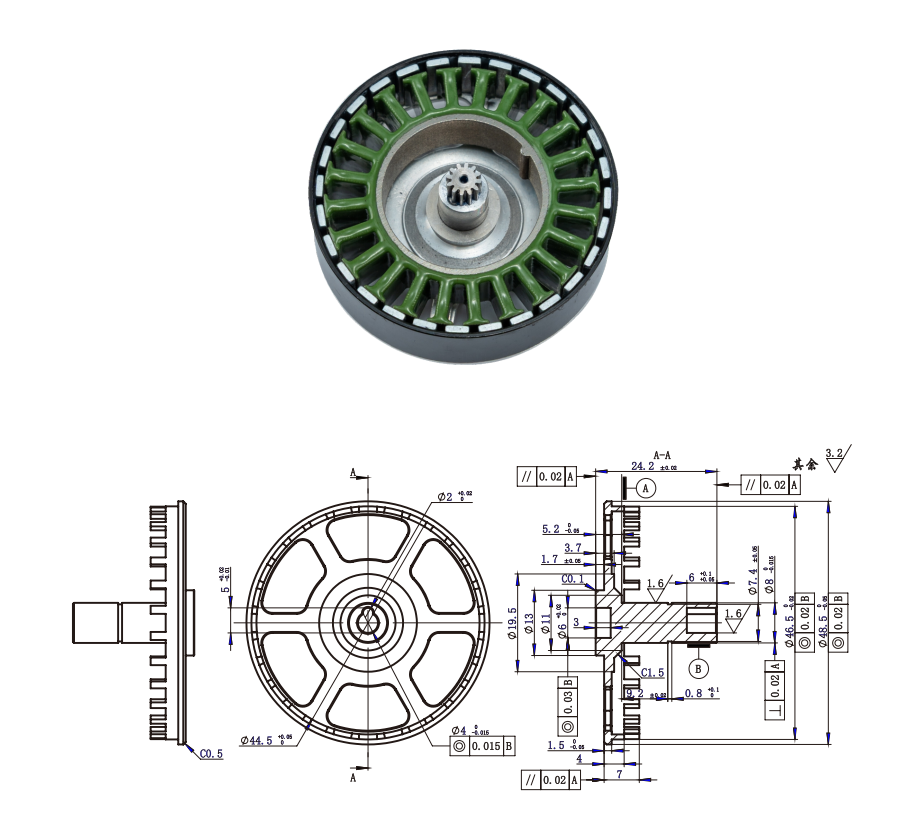
结构与尺寸
外径 Φ44.5mm,属于紧凑型外转子无刷直流电机(BLDC),扁平化结构高度适配机器人关节的模块化集成需求,不占用过多空间。
外转子设计可提供更高的扭矩密度,同时转子惯量适中,有利于关节的动态响应与精准定位。
精密形位公差(0.02~0.03mm)保证了高速与负载下的低震动、低噪音,提升关节运动稳定性。
电气与性能
额定电压 48V,属于工业级直流高压方案,功率密度高,可与主流移动机器人、协作机器人的电池系统直接兼容。
额定功率 80W(MAX),额定转速 1000rpm,扭矩输出平稳,适合轻负载关节驱动场景。
无刷结构无碳刷磨损,寿命长、免维护,可满足机器人长期连续运行的可靠性要求。
控制与能效
无刷电机支持精准调速与位置控制,配合减速器可实现关节的高定位精度与柔顺控制。
高效绕组设计与外转子散热结构,降低了能耗与温升,提升了机器人续航与连续工作能力。
二、应用场景
| 应用场景与实践 | |||
| 应用场景 | 对应机器人部件 | 可行性匹配点 | 实践场景 |
| 协作机器人 | 轻负载腕部关节、末端执行器驱动 | 小体积 + 48V 供电便于关节模块化;80W 功率适配≤5kg 负载;低噪低震符合人机协作安全标准 | 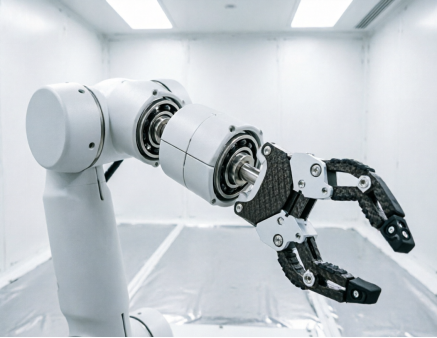 |
| 服务机器人 | 云台俯仰/ 偏航关节、机械臂小关节 | 免维护特性适合家用 / 商用长期运行;1000rpm 转速配合减速器可实现精准姿态控制 | 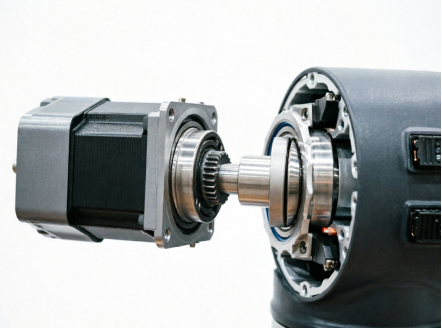 |
| AGV/AMR辅助机构 | 转向关节、辅助升降 / 平移机构 | 48V 电压与 AGV 电池系统兼容;高效节能提升续航;紧凑结构利于底盘空间布局 |  |
| 小型工业机器人 | 小型工业机器人取放机械手、检测机构关节 | 高精度公差保证重复定位精度;稳定扭矩满足高频往复动作需求 |  |
| 仿生 / 教育机器人 | 仿生关节、教学演示平台 | 轻量化 + 小尺寸便于多自由度设计;成本适中,适合科研与原型开发 |  |
三、定制化进阶解决方案
针对有仿生级动作真实感、极致轻量化、生物级柔顺力控需求,且具备嵌入式开发能力的研发团队与厂商,我们提供成熟的全链条配套方案:核心 BLDC 无刷关节电机 + 自研 / 开源驱动板适配 + 定制化控制器配套。
作为当前顶级仿生机器人的主流应用方案,它支持驱动板内置隐藏设计,仅外露高质感金属转轴,既保障高性能驱动与柔顺控制,又完美保留电机全新工业质感,满足仿生结构的高真实感设计要求。
如需适配选型、方案定制,可随时联系我们的技术团队获取专属支持。







